
Метод управления крутящим моментом-углом (TA) также известен как гиперэластичный метод управления
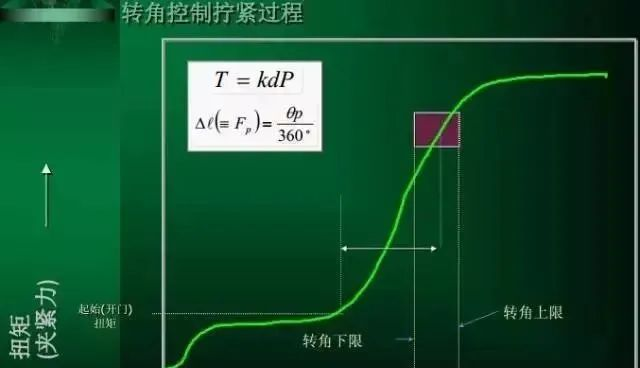
Метод управления крутящим моментом-угловым управлением состоит в Том, чтобы сначала закрутить болт в небольшой крутящий момент, который обычно составляет 40 -60% от момента, установленного после технологической проверки, и с тех пор, начиная с этого момента, поворачивать установленный угол управления.
Этот метод основан на определенных углах, где болты генерируют определенное осевое растяжение и соединители сжаты. Цель состоит в Том, чтобы закрутить болты в плотно соконтактные лица и преодолеть некоторые поверхностные факторы неравномерности, в то время как сила осевого зажима, требуемая за ними, возникает из-за угла. После вычисления угла влияние сопротивления трения на силу осевого зажима больше не существует, так что его точность выше, чем просто метод управления крутящим моментом, который является точкой измерения начала угла, и как только этот угол определен, мы можем получить довольно высокую точность винта.
Из-за сравнительн передов метод затян и созда инструмент адаптирова к производительн, эт электрическ укреп инструмент, эт управля мотор — зуб-углов передач-сенсор ждат, относительн легк создан предупрежден момент и начальн угл.
Приложение:
◆ прикладн фиксирова крутя момент (начальн (двер открыва) крутя момент)
◆ враща пряжк узк-добра до запланирова угл
◆ подальш от на колен укреп начал, такж использова в эластичн региональн.
◆ нужн использова испытан определ звездн (двер открыва) крутя момент с "параметр за угл"
◆ предварительн крепк сил правильн градус ± 15%
Преимущества крутящего момента-управления углом (TA) : высокая точность винта позволяет получить большую силу осевого зажима.
Недостатком является то, что ее контрольная система является более сложной, что требует измерения предварительного крутящего момента и двух данных за углом, и что сектору качества трудно найти правильный способ для проведения инспекции и последующего анализа результатов закручивания.
03
Метод управления точкой подчинения (TG)
Через там заж стрем., что то же сам "погрешн за угл" в сво-" сексуальн болт аксиальн предварительн d dмест сил погрешн в F2 эластичн болт аксиальн предварительн в сил погрешн в F1 горазд меньш. Метод управления точкой уступок — это Один из способов остановить зажим после того, как он затянется до точки уступок. Это высочайший метод затягивания, разработанный с помощью явления, при котором материалы подчиняются. Этот метод управления определяется последовательным расчетом и суждением кривой крутящего момента/угла закручивания.
Во время закручивания болт изменяется кривая крутящего момента/угла, см. крутящий момент и контраст крутящего момента. Когда начинается настоящее затягивание, наклон поднимается очень быстро, а после короткой задержки остается постоянным (интервал a_b). После перехода к точке b, его наклон медленно снижается и быстро опускается. Когда наклон снижается до определенного значения (в общем определении, когда его наклон снижается до одной трети максимума), он указывает на то, что он достиг точки уклонения (т.е. точки Q в контрастной графах крутящего момента) и немедленно дает сигнал прекратить закручивание. Точность винта в методе контроля точек прогиба очень высока, и погрешность ее предварительной силы может быть ограничена не более чем в 0,4%, но ее точность зависит в основном от прочности самого болта.
◆ крутя момент с "в затян за угл" отслежива
◆ когд немн максимум градиент пада когд признак сам больш градиент с текучест
◆ использова максимальн сил дав потенциа
◆ трен не уменьша
◆ позвол кажд раз к черт наблюден крутя момент угл
◆ болт не мог повторн использован
◆ предварительн крепк сил правильн градус ± 8%












